马尔科夫链是描述状态转换的随机过程,该过程具备“无记忆”的性质:即当前时刻t的状态s_t的概率分布只由前一时刻t-1的状态s_{t-1}决定,与时间序列中t-1时刻之前的状态无关。定义马尔科夫链的转移矩阵为\mathcal A,有\large \mathcal{A}_{ij}=p\left(s_{t}=j | s_{t-1}=i\right),\text{ }s_{t} | s_{t-1} \sim \operatorname{Discrete}\left(\mathcal{A}_{\large s_{t-1}, :}\right)容易看出矩阵\mathcal A的每行之和为1,给定一个起始状态s_1(也可通过某个分布产生),可通过转移矩阵抽样生成序列\left(s_{1}, s_2, \dots, s_{t}\right)。
模型定义
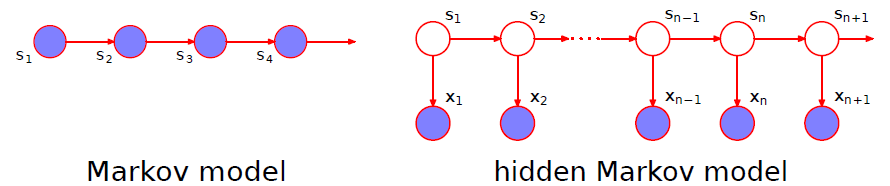
隐马尔科夫模型HMM假设观测是从一个隐藏的马尔科夫状态序列生成的,如下图所示:
- 不失一般性,假设共有S个离散状态,即s \in \{1,2,\dots,S\}
- 不失一般性,假设共有X种观测,即x \in \{1,2,\dots,X\}
- 定义初始的状态分布为\vec{\pi}=(\pi_1,\pi_2,\dots,\pi_S),即s_{1} \sim \operatorname{Discrete}(\vec{\pi})
- 定义状态s的转移矩阵为\mathcal{A},则\mathcal{A}为S行S列的矩阵,即s_{i} |\left\{s_{i-1}=k^{\prime}\right\} \sim \operatorname{Discrete}\left(\mathcal{A}_{k^{\prime}, :}\right)
- 定义观测x的生成概率为\mathcal{B},则\mathcal{B}为S行X列的矩阵,即x_{i} |\left\{s_{i}=k^{\prime}\right\} \sim \operatorname{Discrete}\left(\mathcal{B}_{k^{\prime}, :}\right)
则HMM的求解可归纳为以下两个问题:
- 训练:已知观测序列\vec{o}=(x_1,x_2,\dots,x_T),使用最大似然估计计算参数\vec{\pi},\mathcal{A},\mathcal{B},即\large \vec{\pi}_{\mathrm{ML}}, \mathcal{A}_{\mathrm{ML}}, \mathcal{B}_{\mathrm{ML}}=\underset{\large \vec{\pi},\mathcal{A},\mathcal{B}}{\arg \max}\space p\left(\vec{o} | \vec{\pi},\mathcal{A},\mathcal{B}\right)
- 预测:已知观测序列\vec{o}以及参数\vec{\pi},\mathcal{A},\mathcal{B},估计生成观测序列\vec{o}的最可能的隐藏状态序列\vec{s}=(s_{1}, \ldots, s_{T}),即\large s_{1}, \ldots, s_{T}=\underset{\large \vec s}{\arg \max}\space\space p\left(\vec{s} | \vec{o}, \vec{\pi},\mathcal{A},\mathcal{B}\right)
参数估计
要解决问题1,首先看一下如何估计p\left(\vec{o} | \vec{\pi},\mathcal{A},\mathcal{B}\right),根据概率公式,有\large{\begin{aligned} p(\vec{o} | \vec{\pi}, \mathcal{A}, \mathcal{B}) &=\sum_{s_{1}=1}^{S} \cdots \sum_{s_{T}=1}^{S} p\left(\vec{o}, s_{1}, \ldots, s_{T} | \vec{\pi}, \mathcal{A},\mathcal{B}\right) \\ &=\sum_{s_{1}=1}^{S} \cdots \sum_{s_{T}=1}^{S} \pi_{s_1}\mathcal{B}_{s_1,x_1}\prod_{i=2}^{T}\mathcal{A}_{s_{i-1},s_i}\mathcal{B}_{s_i,x_i} \end{aligned}}如果按上述公式直接进行计算,复杂度为\mathcal{O}(TS^T),效率太低,考虑使用动态规划的思想,将算法复杂度降为\mathcal{O}(TS^2),可以使用两种方式:
1. Forward Algorithm
- 定义\alpha_{t}(j)=p\left(x_{1}, x_{2} \ldots x_{t}, s_{t}=j | \vec{\pi}, \mathcal{A},\mathcal{B}\right),\text{ }t\in\{1,2,\cdots,T\},\text{ }j\in\{1,2,\cdots,S\},则算法可以写为:
- Initialization: \alpha_{1}(j)=\pi_j\mathcal{B}_{j,x_1}; \quad 1 \leq j \leq S
- Recursion: \alpha_{t}(j)=\sum_{i=1}^{S} \alpha_{t-1}(i) \mathcal{A}_{i j} \mathcal{B}_{j,x_t} ; \quad 1 \leq j \leq S, 1\lt t \leq T
- Termination: p\left(\vec{o} | \vec{\pi},\mathcal{A},\mathcal{B}\right)=\sum_{i=1}^{S} \alpha_{T}(i)
2. Backward Algorithm
- 定义\beta_{t}(i)=p\left(x_{t+1}, x_{t+2} \ldots x_{T} | s_{t}=i, \vec{\pi}, \mathcal{A},\mathcal{B}\right),\text{ }t\in\{1,2,\cdots,T\},\text{ }i\in\{1,2,\cdots,S\},则算法可以写为:
- Initialization: \beta_{T}(i)=1; \quad 1 \leq i \leq S
- Recursion: \beta_{t}(i)=\sum_{j=1}^{S} \mathcal{A}_{i j} \mathcal{B}_{j,x_{t+1}} \beta_{t+1}(j) ; \quad 1 \leq i \leq S, 1 \leq t < T
- Termination: p\left(\vec{o} | \vec{\pi},\mathcal{A},\mathcal{B}\right)=\sum_{j=1}^{S} \pi_{j} \mathcal{B}_{j,x_1} \beta_{1}(j)
使用EM算法求解\vec{\pi}_{\mathrm{ML}}, \mathcal{A}_{\mathrm{ML}}, \mathcal{B}_{\mathrm{ML}},关于EM算法的具体介绍可参考文章EM算法和变分推断介绍。具体到该问题,又被称为Forward-Backward Algorithm(i.e., Baum-Welch Algorithm):
- 假设参数的当前估计值\mathcal{\Lambda}^*=[\vec{\pi}^*,\mathcal{A}^*,\mathcal{B}^*],则有
- E-step: 定义\hat{q}(\vec{s})=p(\vec{s} | \vec{o}, \mathcal{\Lambda}^*),以及\mathcal{L}(\vec{o},\mathcal{\Lambda},\hat q)=\mathbb{E}_{\hat q}[\ln p(\vec{o}, \vec{s} | \mathcal{\Lambda})]。容易看出\ln p(\vec{o}, \vec{s} | \mathcal{\Lambda})= \underbrace{\ln \pi_{s_1}}_{\text{ initial state }} +\sum_{t=2}^{T} \underbrace{\ln \mathcal{A}_{s_{t-1}, s_t}}_{\text { Markov chain }} + \sum_{t=1}^{T} \underbrace{\ln \mathcal{B}_{s_t, x_t}}_{\text { observations }}因此\mathcal{L}的形式可写为\mathcal{L}(\vec{o},\mathcal{\Lambda},\hat q)=\sum_{k=1}^{S} \gamma_{1}(k) \ln \pi_{k}+\sum_{t=2}^{T} \sum_{j=1}^{S} \sum_{k=1}^{S} \xi_{t}(j, k) \ln \mathcal{A}_{j, k}+\sum_{t=1}^{T} \sum_{k=1}^{S} \gamma_{t}(k) \ln \mathcal{B}_{k, x_{t}}其中\gamma_t(k)=p(s_t=k | \vec{o}, \mathcal{\Lambda}^*),\text{ }\xi_t(j,k)=p(s_{t-1}=j,s_t=k | \vec{o}, \mathcal{\Lambda}^*),由贝叶斯公式可知\large{\begin{cases} \gamma_t(k)=\frac{\large p(\vec{o}, s_t=k | \mathcal{\Lambda}^*)}{\large p(\vec{o} | \mathcal{\Lambda}^*)}=\frac{\large \alpha_t(k)\beta_t(k)}{\large \sum_{m=1}^S\alpha_t(m)\beta_t(m)} \\ \xi_t(j,k)=\frac{\large p(\vec{o}, s_{t-1}=j, s_t=k | \mathcal{\Lambda}^*)}{\large p(\vec{o} | \mathcal{\Lambda}^*)}=\frac{\large \alpha_{t-1}(j)\mathcal{A}_{jk}^*\mathcal{B}_{k,x_t}^*\beta_t(k)}{\large \sum_{m=1}^S\alpha_t(m)\beta_t(m)} \end{cases}}注意此时的\alpha_t(\cdot)以及\beta_t(\cdot)是从参数的当前估计值\mathcal{\Lambda}^*计算出来的
- M-step: 更新参数的估计值\mathcal{\Lambda}^*=\underset{\mathcal{\Lambda}}{\arg\max}\space\mathcal{L}(\vec{o},\mathcal{\Lambda},\hat q),有\pi_{k}^*=\frac{\gamma_{1}(k)}{\sum_{j=1}^S \gamma_{1}(j)}, \quad \mathcal{A}_{jk}^*=\frac{\sum_{t=2}^{T} \xi_{t}(j, k)}{\sum_{t=2}^{T} \sum_{l=1}^{S} \xi_{t}(j, l)}, \quad \mathcal{B}_{kv}^*=\frac{\sum_{t=1}^{T} \gamma_{t}(k) I\left(x_{t}=v\right)}{\sum_{t=1}^{T} \gamma_{t}(k)}在实际应用中使用的不仅仅是1个观测序列,假设有N个序列,每个序列的长度为T_n,\text{ }n\in\{1,2,\cdots,N\},则每个序列可以计算出自己的\gamma_t和\xi_t,记为\gamma_t^{(n)}和\xi_t^{(n)},更新公式变为\pi_{k}^*=\frac{\sum_{n=1}^{N} \gamma_{1}^{(n)}(k)}{\sum_{n=1}^{N} \sum_{j=1}^S \gamma_{1}^{(n)}(j)}, \quad \mathcal{A}_{jk}^*=\frac{\sum_{n=1}^{N} \sum_{t=2}^{T_{n}} \xi_{t}^{(n)}(j, k)}{\sum_{n=1}^{N} \sum_{t=2}^{T_{n}} \sum_{l=1}^{S} \xi_{t}^{(n)}(j, l)}, \quad \mathcal{B}_{kv}^*=\frac{\sum_{n=1}^{N} \sum_{t=1}^{T_{n}} \gamma_{t}^{(n)}(k) I\left(x_{t}^{(n)}=v\right)}{\sum_{n=1}^{N} \sum_{t=1}^{T_{n}} \gamma_{t}^{(n)}(k)}

- 迭代上述步骤直到收敛为止
隐藏状态序列估计
为了解决问题2,仍使用动态规划的思想(Viterbi Algorithm),定义v_{t}(j)=\underset{s_{1}, \ldots, s_{t-1}}{\max} p\left(s_{1}, \ldots s_{t-1}, x_{1}, x_{2}, \ldots x_{t}, s_{t}=j | \mathcal{\Lambda}\right),此外还要定义b_t(j)用来存储v_{t}(j)对应的s_{t-1},则算法可以写为
- Initialization: v_1(j)=\pi_j\mathcal{B}_{j,x_1},\text{ }b_1(j)=0; \quad 1 \leq j \leq S
- Recursion: \begin{array}{ll}v_{t}(j)=\underset{i \in\{1,2, \cdots, S\}}{\max} v_{t-1}(i) \mathcal{A}_{i j} \mathcal{B}_{j, x_{t}} ; \quad 1 \leq j \leq S, 1<t \leq T \\ b_{t}(j)=\underset{i \in\{1,2, \cdots, S\}}{\arg \max } v_{t-1}(i) \mathcal{A}_{i j} \mathcal{B}_{j, x_{t}} ; \quad 1 \leq j \leq S, 1<t \leq T \end{array}
- Termination: \begin{aligned} & \text { The best score: } P^*=\max _{\vec{s}} p\left(\vec{s},\vec{o} | \mathcal{\Lambda} \right)=\max _{i\in\{1,2,\cdots,S\}} v_{T}(i) \\ & \text { The start of backtrace: } s_{T}^*=\underset{i\in\{1,2,\cdots,S\}}{\operatorname{argmax}} v_{T}(i) \end{aligned}
- Backtrace: s_{t}^*=b_{t+1}(s_{t+1}^*); \quad 1 \leq t<T容易看出s_1^*,s_2^*,\ldots,s_T^* = \underset{\vec s}{\arg\max}\space\space p\left(\vec{s},\vec{o}| \mathcal{\Lambda}\right)=\underset{\vec s}{\arg\max}\space\space p\left(\vec{s}|\vec{o},\mathcal{\Lambda}\right)
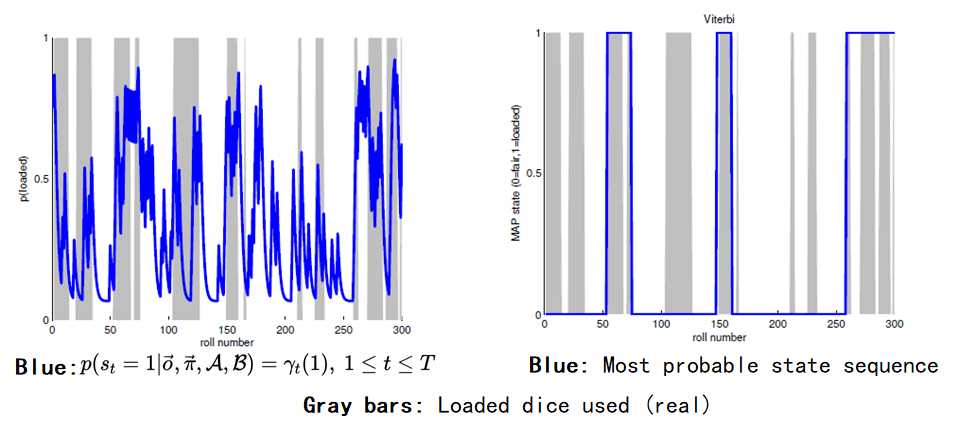
下面介绍一个使用HMM的简单例子:假设有两个骰子,一个未经处理(fair, 记为0),一个经过处理(loaded, 记为1)。每次投掷时使用前一次投掷的骰子,或者使用另一个骰子,观测序列是多次投掷所得到的骰子点数序列。假设真实的参数如下图所示,目标是通过观测序列估计真实的参数,进而估计出每次投掷使用的是哪个骰子。

最终的结果如下图所示,右图表示使用Viterbi算法得到的最可能的隐藏状态序列(即每次投掷使用了哪种骰子),注意左图进行简单地四舍五入后的结果不等于右图,因为左图并没有考虑状态之间的关联。